
 产品:89
产品:89
 联系我们
联系我们

那智机器人简单编程说明:
一、 示教的步骤:
示教以如下的步骤进行;
1、选择示教模式;示教以示教模式进行。
2、输入作业程序号码;输入婴编制的作业程序的号码;号码的输入范围是0.9999。
3、记录移动命令(动作位置与姿势);将机器人以手动操作移动至记录位置以及姿势;按下[覆盖/记录]以记录步骤(移动命令);重复地依序记录步骤(移动命令)。
4、视需要,记录应用命令;将应用命令记录于适当的步骤。应用命令记录好了,即可将信号;输出到外部,或使机器人待机。
5、将表示程序结束的终端命令(应用命令END)加以记录;在动作的*后的步骤,记录终端命令(应用命令END);而作为*后步骤。
6、进行示教内容的确认;依序移动至所记录步骤,进行记录位置或姿势的确认;进行示教内容的修正。
二、关于示教中的画面显示;
在示教中的画面,显示有如下各类信息。示教之前,*好事先记住作为预备知识。
一、 示教的步骤:
示教以如下的步骤进行;
1、选择示教模式;示教以示教模式进行。
2、输入作业程序号码;输入婴编制的作业程序的号码;号码的输入范围是0.9999。
3、记录移动命令(动作位置与姿势);将机器人以手动操作移动至记录位置以及姿势;按下[覆盖/记录]以记录步骤(移动命令);重复地依序记录步骤(移动命令)。
4、视需要,记录应用命令;将应用命令记录于适当的步骤。应用命令记录好了,即可将信号;输出到外部,或使机器人待机。
5、将表示程序结束的终端命令(应用命令END
6、进行示教内容的确认;依序移动至所记录步骤,进行记录位置或姿势的确认;进行示教内容的修正。
二、关于示教中的画面显示;
在示教中的画面,显示有如下各类信息。示教之前,*好事先记住作为预备知识。
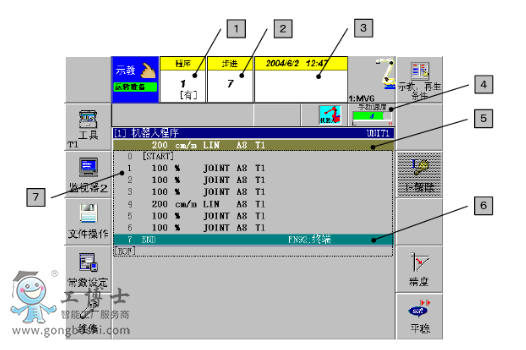
1、程序号码
显示当前所选程序的号码。此外,步骤1个也未记录时显示“无”,只要记录有1个,显示“有"。
2、步骤号码
显示当前所选步骤的号码。
3、评注
作业程序的步骤1所记录的评注(应用命令REM),其内容被显示作为作业程序本身的评注。应用命令REM的*大字符数为半角230字,而其开头38字符(半角)的评注被显示。
4、手动速度
面向NACHI用户的机器人,这里所设定的速度也被作为移动命令的速度反映出来。每次按下[检查速度/手动速度],即切换记录状态的速度。
5、记录状态
当前所设定速度或内插方法在此显示。按下[覆盖/记录]时,即以记录状态所显示的条件记录移动命令。
6、光标
系表示操作对象的光标。以绿色棒条显示。
7、程序的内容
显示所记录的步骤。步骤号码附加于移动命令以及应用命令。*大可记录至999步骤。
显示当前所选程序的号码。此外,步骤1个也未记录时显示“无”,只要记录有1个,显示“有"。
2、步骤号码
显示当前所选步骤的号码。
3、评注
作业程序的步骤1所记录的评注(应用命令REM
4、手动速度
面向NACHI用户的机器人,这里所设定的速度也被作为移动命令的速度反映出来。每次按下[检查速度/手动速度],即切换记录状态的速度。
5、记录状态
当前所设定速度或内插方法在此显示。按下[覆盖/记录]时,即以记录状态所显示的条件记录移动命令。
6、光标
系表示操作对象的光标。以绿色棒条显示。
7、程序的内容
显示所记录的步骤。步骤号码附加于移动命令以及应用命令。*大可记录至999步骤。
三、示教的基本操作-面向DAIHEN 的用户;移动命令的示教
(1)手动操作机器人至要记录的位置。
(2)按下[压板/弧焊]。常用命令显示为f键(f1~f12)。
(3)移动命令自以下的中选择。
f7: 定位P (关节内插。与以往的"P”相同.)
f8: 直线L (直线内插。与以往的"L"相同.)
f9: 圆弧C (圆弧内插。与以往的“C"相同.)
(4)设定速度或精度等的各数据。
速度..系至记录位置的移动速度。精度.系通过各步骤时所取得内回轨迹的程度,与以往DAIHEN机器人的“重叠有/无”相同,也即Accuracy (**度)。精度可指定A1-A8的8阶段,与以往DAIHEN机器人为同样间隔,可用“重叠有/无"来选择。此时“有”为A8,“无”为Al.
(5)按下f12<写入>时,即记录移动命令。
(6)已记录的移动命令要连续记录时,按下[覆盖/记录]。
四、所谓内插种类
所谓内插种类即为用来决定如何移动工具的**者。

更多有关那智机器人的问题请电话联系我们。
- 下一篇:那智机器人轴配置参数操作流程!
- 上一篇:那智机器人示教器故障报警,如何解决!